Making the most of autonomous mining system
As underground mines look to harness higher levels of autonomy, there is a case to be made for the more widespread use of simulation and optimisation
The fully autonomous mine is often seen as the ultimate goal of modern mining - the pinnacle of technological capability and the safest, most efficient option for the production of minerals and metals. But, contrary to these assumptions, full autonomy isn’t a blanket concept that’s applicable to every operation or machine. In fact, there are instances where, given the business’ near-term goals and interests, autonomous operations could be a hinderance rather than a help.
To ensure capital and resources are deployed only when and where they are needed, and give implementations the best chance of success, miners must holistically assess the benefits and limitations of autonomous systems using data-driven insights. By aligning their technology choices, application and timing with the business’ objectives and the physical realities of their operations, companies can ensure the maximum return on their investment (ROI) and set themselves up for future success with autonomy.
Climbing the automation maturity scale
The mining industry has been leveraging autonomous capabilities on underground equipment for some time. As the GMG explains in its 2019 Guideline for the Implementation of Autonomous Systems in Mining (currently undergoing revision): “Mining is increasingly embracing automation as a safety and productivity enabler and as a critical factor in making future mining methods sustainable. Successfully implementing autonomous systems can improve safety, increase production efficiency, and lower maintenance costs.”
However, moving from lower levels of autonomy i.e., using line-of-sight or tele-remote operation, or semi-autonomous operator assist functions, to highly autonomous machines and fleets - those that can dynamically deploy themselves and adapt their routes according to developing challenges - is quite a jump.
Steven Donaldson, Partner and Co-founder of Polymathian, explained: “Although semi- and fully-autonomous capabilities have been available for underground equipment for a while, mines are only just figuring out how to optimise these systems.”
Most underground mines that use autonomy today would sit at level 1 or 2 on the GMG’s Mining Automation Maturity Model (see figure 1). At level 1 (assistance), the system has function-specific automated features, and the operator maintains control throughout the task. At level 2 (semi-autonomous), the system performs a portion of its tasks autonomously within a set of predefined parameters.
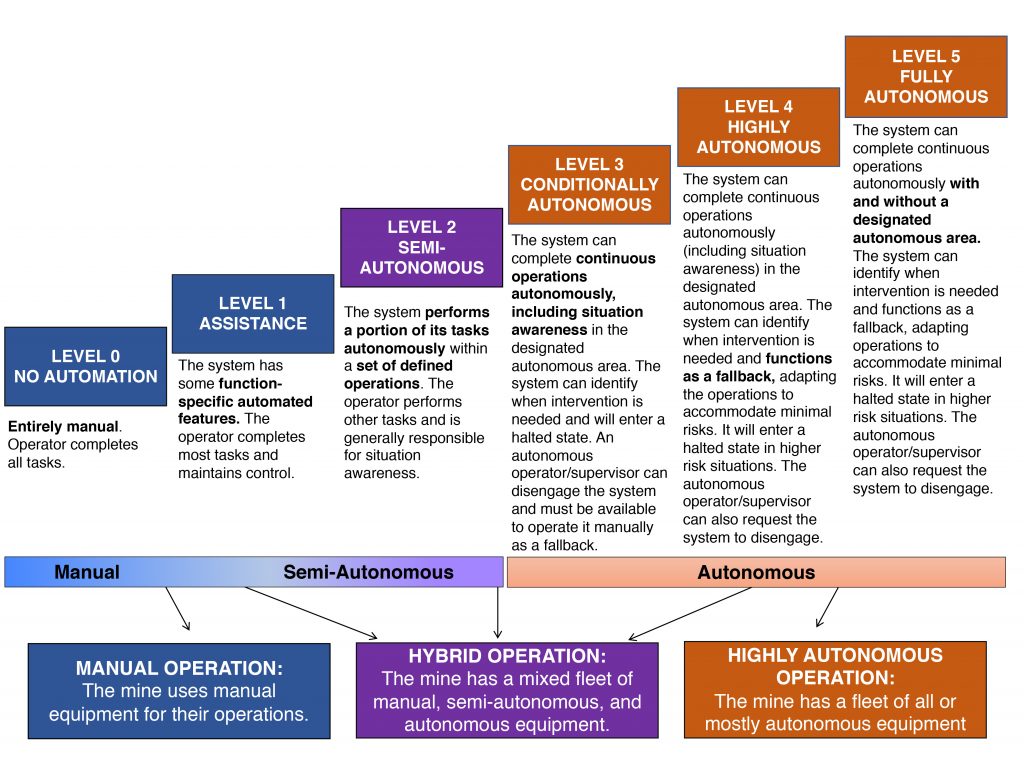
Figure 1. Mining Automation Maturity Model (Figure Design, GMG)
Level 3 systems (conditionally autonomous) can complete operations autonomously in a designated area. They have situational awareness capabilities and enter a halted state when intervention is needed.
Level 4 (highly autonomous) systems can complete sustained operations autonomously in a designated area and have situation-awareness capabilities. These systems can intervene in minimal risk situations and enter a halted state in higher risk situations. Supervisors can also request the system to disengage.
At level 5 (fully autonomous), the system can complete sustained operations autonomously with or without a designated autonomous area, has situational awareness capabilities and can intervene in minimal risk situations. In high-risk situations, it enters a halted state and the supervisor can request disengagement.
In mining, level 4 and 5 operations are exceptions today. To achieve this degree of automation requires more than just autonomous equipment, the systems and decision-making processes supporting the operation must also be automated.
Under Rio Tinto’s ownership, Northparkes mine (now owned by CMOC) in Australia became the first fully autonomous underground mine in 2015, with Resolute Mining’s Syama operation in Mali becoming the first autonomous mine with truck haulage in 2018. Despite nearly a decade having passed since the first implementation, there are still relatively few examples of highly autonomous underground mining operations. This speaks volumes about the level of change required to see the full benefit of these technologies.
As with any nascent concept, there have been successes but also failures amongst the first adopters. Today, there are mathematical optimisation and simulation technologies which can help mines determine the level of autonomy and the implementation approach that best suits their business. Leaning on these will help to de-risk deployments and build a stronger case for the introduction or expansion of autonomous operations.
Simulate and quantify automation for greater success
As part of the decision to implement autonomy, it's important to consider how its introduction will support the business' overarching commitments, how it fits with its current strengths and limitations, and how success will be measured.
For example, success with autonomy usually requires a balance between productivity and safety. At the operational level, key performance indicators (KPIs) are often linked to productivity. With the correct conditions, semi and highly autonomous systems can support long-term productivity through consistent production and fleet predictability. However, the speed that autonomous trucks and loaders travel at might be slower than manned units which could mean that short-term productivity is lower.
Also consider in which areas of the operation autonomous systems will be most useful. For example, automating a development heading in a far corner of the mine would offer a different value proposition to automating a truck in the production fleet.
Colin Eustace, Head of Simulation at Polymathian explained: "Many mines see level 5 as the peak of modern mining, but depending on the business' objectives, level 2 or 3 might make more sense. It may also be prudent to keep certain pieces of equipment operating manually, or to use different levels of autonomy on different levels of the mine at different times."
Simulation can be used to validate the feasibility of new designs and concepts, such as automation, and in modelling changes to existing processes and operations over time.
Eustace said: "Simulation can test what will happen over time in a system when a constraint – such as people – is added or removed. Mines can use these tools in advance of making changes to see whether or not the safety and long-term productivity gains would mitigate any short-term production losses. They can also evaluate whether the mine could make up any potential losses by automating its decision-making processes."
Simulation can also be layered with mathematics-based optimisation tools to find the best possible approach to autonomy given the mine’s current constraints. For example, it can be used to determine the optimal implementation approach for autonomous systems e.g., slow, phased or fast, depending upon the company's risk tolerance, regulatory and cost pressures etc. (see figure 2).
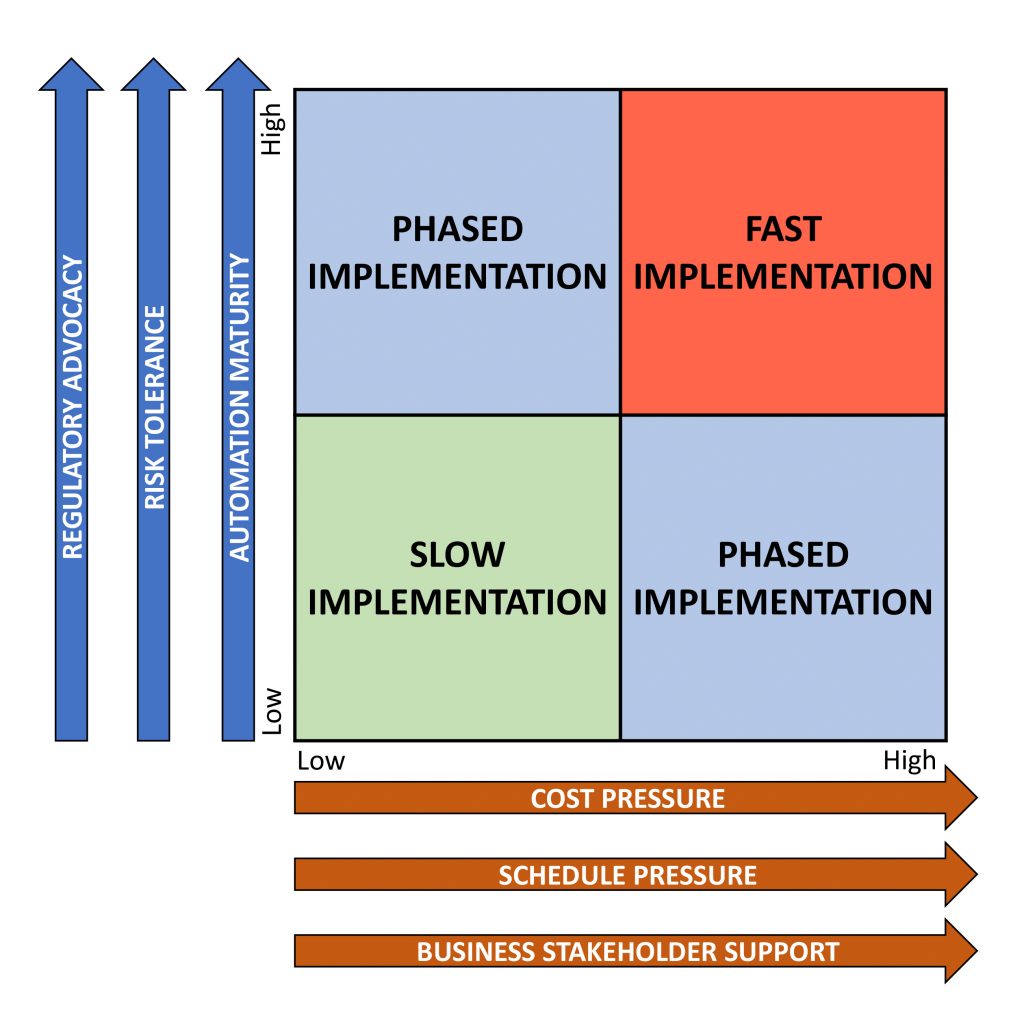
Figure 2. Factors Influencing the Choice of Implementation Approach (Figure Design, GMG Contributor)
Automated decision making for advanced autonomy
At the higher levels, automation is rarely a point solution. To get the most from these technologies requires a holistic view of their effects on the mine’s systems and processes, including mine design, KPIs, schedules, haulage routes, rules and roles, across different time horizons.
Optimising these systems for autonomous operations is easier at greenfield sites than brownfields. Simply switching manned equipment for autonomous units at a mine that’s designed for human operations usually results in a sub-optimal ROI, and early use cases have shown that it’s important to budget and plan for more extensive change.
Donaldson said: "By automating decision making in processes like scheduling and dispatching, mines can create systems that are more dynamic and responsive than those run by humans. The model never gets tired and never makes errors so it’s possible to always get the best out of the operation no matter how many times the business’ priorities shift."
Automated decision making can be used with or without autonomous equipment, but bringing the two together creates a highly efficient and adaptive operation.
In 2014, Polymathian developed an optimisation tool called ORB for Newcrest’s Cadia operation in Australia to autonomously orchestrate the mine’s fleet of loaders based on the real-time cave state. The aim was to eliminate bottlenecks in the materials handling system.
Early on in Polymathian’s engagement with the company, a simulation model demonstrated a potential improvement to mine productivity which justified the system’s deployment. ORB has since delivered a 20% productivity increase and Newcrest has used it to successfully add autonomous loaders to Cadia’s production fleet.
Donaldson added: "Automating and optimising the planning processes surrounding autonomous operations can help to mitigate any productivity losses, making operations more profitable from the get-go."
Extending the benefits of automation across value chains
While simulation and optimisation have been used as strategic analysis tools in mining for some time, the prescriptive and tactical capabilities they can provide through automated decision making are only just being realised.
These tools are proving vital in building the autonomous mines of the future. Early use cases have shown that without the backing of simulation and optimisation software, it’s difficult, if not impossible for mines to see the full benefit of autonomy and, as more companies begin to understand this, their usage will become more commonplace.
In the future, as mining organisations look to extend the efficiencies autonomy offers across their value chains, simulation and optimisation will be key in delivering metals and minerals critical to the energy transition.
Article contributor

Carly Leonida, Freelance technical writer and editor | Owner/author of The Intelligent Miner | European editor at Mining Media Intl
Carly has been writing for and managing some of the industry’s leading trade titles for over a decade. She is now a freelance technical writer and is on a mission to transform how the world views and relates to mining. Connect with Carly on LinkedIn.